2. Design 1.0 - Perserverance#
2.1. Design 1.0 Überblick:#
2.1.1. Was ist Perserverance:#
Design 1.0 aka Perserverance war unser erster Prototyp der Rakete. Bei welchem es uns nicht ums Aussehen oder Gestalten der Rakete ging. Wir testeten uns bauten uns langsam immer weiter hinauf. Das Ziel von Perserverance war es uns ein gewisses Grundverständnis für unseren zukünftigen Raketen zu geben. Hierbei Probierten wir verschiedene Möglichkeiten um die Rakete in einen sicheren Start und Haltung zu bringen. Die Rakete Bestand mehreren Modulen siehe {Hyperlink to 3.2} für weitere Details.
2.2. Design 1.0 Struktur:#
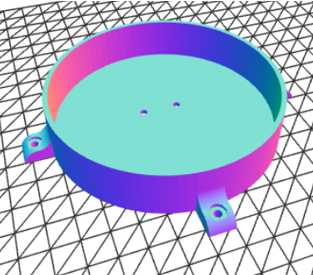
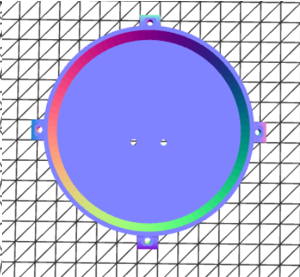
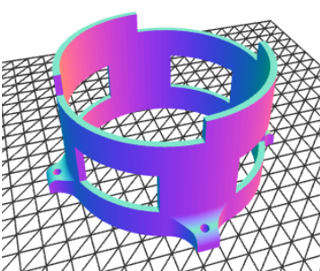
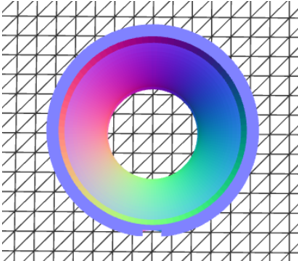
2.2.1. EPM - Electronic Processing Module.:#
Die Aufgabe des EPM- Electronic Processing Modules war es unser Gyrosensor zu beinhalten und uns konstant Daten über die Lora Kommunikation zu übertragen als auch diese über ein Integriertes Data-Logging zu speichern und später auszuwerten. Der Gyrosensor wurde hierbei in den zwei oben abgebildeten Löchern befestigt. Zudem Zeitpunkt waren keine weiteren Gedanken für dieses Modul gedacht und Kabelführung musste händisch abgesichert werden.
|
|
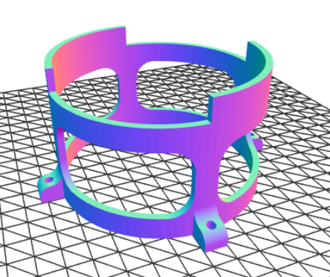
2.2.2. TDM - Thrust Delivery Module:#
VERSION 1.0:
Die Aufgabe des TDM- Thrust Delivery Modules war es unsere Motoren zu stabilisieren, welche wir für den Start als auch die Haltung in der Luft benötigten. Verwendet wurden dabei 2 Motoren. Einer der Motoren wurde an der Oberseite des ihnen oben gezeigten Bildes angehängt, der andere auf der Unterseite. Damit unsere Rakete nicht außer Kontrolle geraten würde, entschieden wir uns dazu die beiden Motoren in die jeweils entgegengesetzte Richtung zu rotieren, um so einen Ausgleich in Schwungrichtung zu erhalten.

|
|
VERSION 2.0:
Bei Version 2 änderte sich nicht viel am TDM. Grund für das Aufspalten des alten Moduls war das Vereinfachte Drucken und Zusammenbauen der Rakete. Zudem fügten wir draußen 2 Schraubenlöcher an den jeweiligen 2 Teilen an, um diese Stabil zusammenzuhalten.
|

|
|
|
VERSION 3.0:
Version 3 folgte dem Beispiel von Version 2. Die Teile wurden erneut ums minimale geändert diesmal waren nur die 2 Schraubenlöcher außerhalb des TDM davon betroffen. Wie sich herausstellte erwiesen die Schrauben nicht den gewünschten Zusammenhalt. Um nun jedoch nicht wieder auf Version 1 zurückzuweichen wurde hier entschieden durch einfaches Löten der Beiden Teile den Zusammenhalt zu sichern.
|

|
|

|
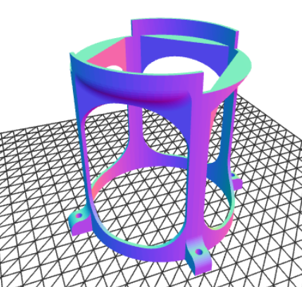
2.2.3. TIM - Thrust Intake Module:#
VERSION 1.0:
Die Aufgabe des TIM- Thrust Intake Modules war es wie im Namen bereits erkennbar den Motoren, welche im TDM befestigt waren, ausreichend Luft zufuhr zu geben. Jedoch war die hier zugefügte Luft nicht ausreichend um unseren Motoren die Möglichkeiten zu bieten genug Schub zu erzeugen um abzuheben.
|

|
VERSION 2.0:
Version 2.0 des TMI war mit viel größeren Öffnungen ausgestattet. Unsere Ergebnisse waren schon um ein einiges besser, jedoch konnten wir trotz größeren Öffnungen nicht das gewünschte Ziel erreichen, welches wir uns vorgenommen hatten. Wir mussten improvisieren um Testungen besser durchzuführen und nahmen das EPM für weitere Tests hinunter, um ideale Lufteinnahmen zu erreichen.
|

|
VERSION 3.0:
Version 2.0 des TMI war mit viel größeren Öffnungen ausgestattet. Unsere Ergebnisse waren schon um ein einiges besser, jedoch konnten wir trotz größeren Öffnungen nicht das gewünschte Ziel erreichen, welches wir uns vorgenommen hatten. Wir mussten improvisieren, um Testungen besser durchzuführen und nahmen das EPM für weitere Tests hinunter, um ideale Lufteinnahmen zu erreichen. Jedoch gelang es uns trotz der Vergrößerung und Ausweitung des Modules trotzdem nicht die Rakete in eine Stabile und ausreichend starke Position zu bringen. Des Weiteren wurde bei der Erstellung der Version 3.0 nicht ganz auf die Ausreichende Menge an Platz für die Verkabelung gedacht.
|

|
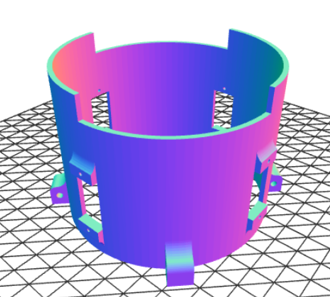
2.2.4. TVC - Thrust Vectoring Module:#
VERSION 1.0:
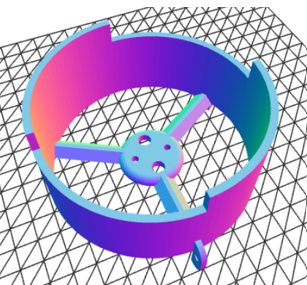
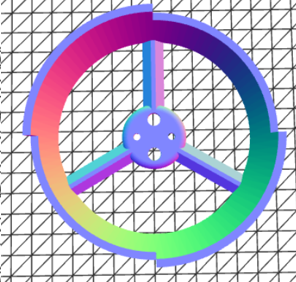
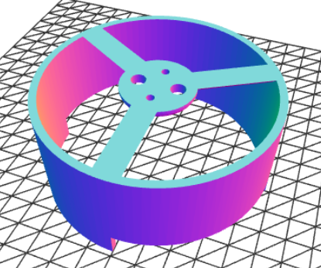
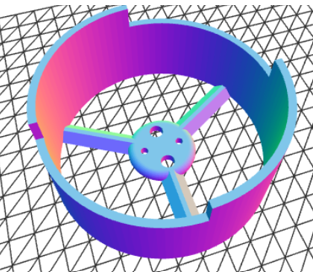
Die Aufgabe des alten TVC- Thrust Vectoring Modules war es die Rakete Zu Stabilisieren und die Luftausgabe in eine bestimmte Richtung zu lenken. Das Modul befand sich direkt unterm dem TDM und war sozusagen direkt für den Air Flow der Rakete verantwortlich. Der Main Part war mit mehreren Servos an den Inneren Ring befestigt mit welchem es uns ermöglicht wurde die Nozzle zu bewegen. Problem hierbei aber war, dass ein gewisser Anteil der Luft vorbeiströmte und es uns nicht möglich war alle Lücken abzudichten.
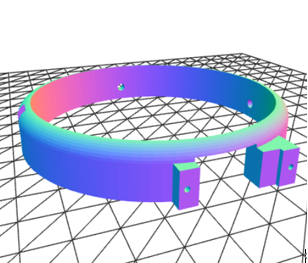
Main Part
|

|
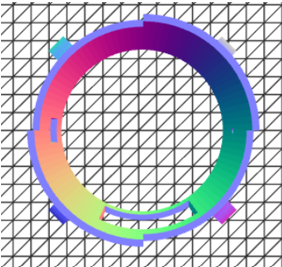
Inner Ring
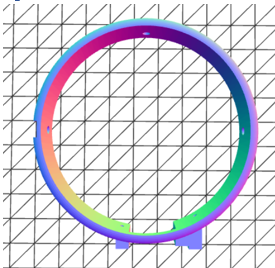
|
|
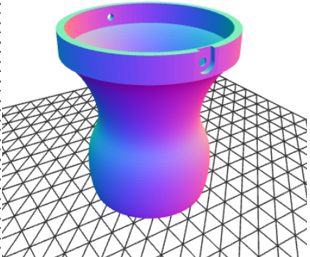
Nozzle
|
|
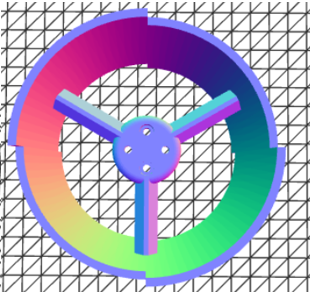
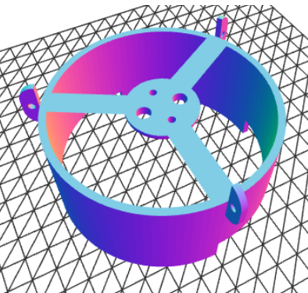
VERSION 2.0:
Um unserem größten Problem mit der Luft Ausweichung entgegenzutreten, entschieden wir uns das TVC- Thrust Vectoring Module von Grund auf zu ändern. Anstatt zu versuchen unseren gesamten Luftstrom durch eine Nozzle verlaufen zu lassen entschieden wir uns den Luftstrom auf übliche weise durch eine Weite Öffnung am TVC durchströmen zu lassen. Um jetzt trotzdem in der Lage zu sein die Rakete zu halten oder zu stabilisieren, wurden vier jeweils gegenübergestellte Fins verwendet, welche die Luftrichtern beim Verlassen der Rakete steuerten.
Fins
|
|
Main Part

|
|
2.3. Design 1.0 Zusammenspiel:#
Zusammengefasst waren die Ergebnisse von Perserverance als erste Rakete erstaunlich gut. Das alleinige Losfliegen beim allerersten Design war überraschend. Jedoch fehlte es der Rakete an Kabelmanagement Möglichkeiten und Air Flow was der Rakete im weiteren Verlauf des Projekts nicht fehlen durfte. Wodurch diese durch das Design 2.0 ersetzt wurde.